水下機(jī)器人市場(chǎng)正在逐漸形成規(guī)模,,資本已經(jīng)涌入,,并且已經(jīng)提供了關(guān)鍵性的支持。行業(yè)頭部企業(yè)已經(jīng)超過10家,,但由于各自的產(chǎn)品定位不同,,導(dǎo)致市場(chǎng)相對(duì)分散,行業(yè)巨頭還未出現(xiàn),。并且在現(xiàn)階段,,這十余家頭部企業(yè)中,已經(jīng)有3-4家企業(yè)的產(chǎn)品重點(diǎn)從B端逐漸向C端傾斜,即由工業(yè)級(jí),,向消費(fèi)級(jí)靠攏,。
根據(jù)中研普華研究院《2022-2027年中國(guó)水下機(jī)器人行業(yè)市場(chǎng)全面分析及發(fā)展趨勢(shì)調(diào)研報(bào)告》分析:
水下機(jī)器人,也稱無人遙控潛水器,,一般可以分為有纜水下機(jī)器人(簡(jiǎn)稱ROV)和無纜水下機(jī)器人(簡(jiǎn)稱AUV)兩大類。水下機(jī)器人技術(shù)誕生于20世紀(jì)50年代初,,在60年代得到快速發(fā)展,。
水下環(huán)境惡劣危險(xiǎn),人的潛水深度有限,,所以水下機(jī)器人已成為開發(fā)海洋的重要工具,。 無人遙控潛水器主要有:有纜遙控潛水器和無纜遙控潛水器兩種,其中有纜避控潛水器又分為水中自航式,、拖航式和能在海底結(jié)構(gòu)物上爬行式三種,。
水下機(jī)器人最早就是開發(fā)用于被軍事、科考,、石油管線等領(lǐng)域,,近年來水下機(jī)器人開始在漁業(yè)環(huán)境檢測(cè)、潛水娛樂等消費(fèi)級(jí)市場(chǎng)興起,。新一輪全球海洋開發(fā)熱潮的到來使得水下機(jī)器人需求急速攀升,,因此國(guó)內(nèi)涌現(xiàn)了一些研發(fā)水下機(jī)器人公司,也陸續(xù)出現(xiàn)了許多形態(tài)各異的產(chǎn)品,。
熱潮來臨,,水下機(jī)器人大有可為,!")
一、水下機(jī)器人市場(chǎng)現(xiàn)狀
目前,,我國(guó)水下機(jī)器人市場(chǎng)規(guī)模在580億元左右,,而在未來的2-3年后,還會(huì)有2-3倍的增長(zhǎng)空間,,行業(yè)前景不可謂不可觀,,但市場(chǎng)潛力如何真正得到釋放,僅靠頭部企業(yè)所表現(xiàn)出來的數(shù)據(jù)并不全面,,腰部企業(yè)對(duì)于水下機(jī)器人行業(yè)的市場(chǎng)前景預(yù)測(cè)也有話說,。
據(jù)行業(yè)調(diào)查分析,2020年我國(guó)水下機(jī)器人市場(chǎng)總值約為580.65億元,,其中資源勘查類,、安全檢測(cè)類、搜索救援類以及商業(yè)應(yīng)用的市場(chǎng)規(guī)模位列前四,分別為241.5億元,、194.3億元,、68.3億元、63億元,。
二,、人工智能技術(shù)在水產(chǎn)養(yǎng)殖中的應(yīng)用
人工智能技術(shù)在水產(chǎn)養(yǎng)殖中的應(yīng)用主要在生命信息獲取、生長(zhǎng)調(diào)控與決策,、疾病預(yù)測(cè)與診斷,、環(huán)境感知與調(diào)控、水下機(jī)器人等領(lǐng)域,。
(1)生命信息獲取,。生命信息獲取的手段需要進(jìn)一步改善,以獲得更加完善,、全面的相關(guān)數(shù)據(jù),。
(2)生長(zhǎng)調(diào)控與決策。遙感衛(wèi)星圖像和地理信息系統(tǒng)是預(yù)測(cè)模型的有效方法,。目前遙感衛(wèi)星圖像已用于估計(jì)海洋或淡水中的綠素與魚類生長(zhǎng)之間的關(guān)系,。因此,在未來的發(fā)展中可以進(jìn)一步確定遙感圖像等與水產(chǎn)養(yǎng)殖中生物生長(zhǎng)之間的關(guān)系,,將人工智能技術(shù)與地理信息系統(tǒng)相結(jié)合開展更多可適用實(shí)際生產(chǎn)中調(diào)控決策應(yīng)用,,并嘗試解決各類養(yǎng)殖環(huán)境下引起的客觀問題,提出可解決養(yǎng)殖生產(chǎn)問題的決策建議,。
(3)魚類疾病預(yù)測(cè)和診斷,。盡管研究團(tuán)隊(duì)已開發(fā)了很多可投入使用的魚類疾病診斷系統(tǒng),但都是對(duì)已發(fā)生疾病種類的判斷,,僅起到輔助診斷的作用,。而根據(jù)實(shí)際生產(chǎn)需要,魚類疾病的預(yù)測(cè)更加有助于提早發(fā)現(xiàn)病情,,可重點(diǎn)關(guān)注以深度學(xué)習(xí)為基礎(chǔ)的魚病預(yù)測(cè)方法,,從時(shí)間序列和空間特征兩方面考慮,有效融合魚病領(lǐng)域知識(shí)和深度學(xué)習(xí)方法,,構(gòu)建可解釋性強(qiáng)的預(yù)測(cè)模型是未來技術(shù)創(chuàng)新的重要方向
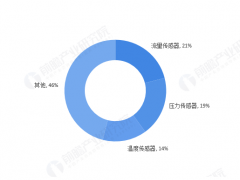
(4)環(huán)境感知,。由于水產(chǎn)養(yǎng)殖中水質(zhì)和環(huán)境的影響因素較多且復(fù)雜,所需使用的環(huán)境感知傳感器種類較多,,且變量不易控制,,模型預(yù)測(cè)和控制的通用性也較差。人工智能技術(shù)在此方向上有很大的發(fā)展空間,,硬件系統(tǒng)方面可集成水質(zhì)傳感器與攝像機(jī),,開發(fā)集水質(zhì)參數(shù)和水下圖像一體的環(huán)境感知系統(tǒng)。軟件方面可進(jìn)一步探索深度學(xué)習(xí)、決策樹等多因子參數(shù)預(yù)測(cè)和有效控制方法在環(huán)境感知中的應(yīng)用,。
(5)水下機(jī)器人,。從國(guó)內(nèi)外發(fā)展情況來看,可實(shí)際應(yīng)用和操作的水下機(jī)器人大多在深遠(yuǎn)海網(wǎng)箱養(yǎng)殖環(huán)境中,,在池塘養(yǎng)殖,、工廠循環(huán)水養(yǎng)殖中作業(yè)的小型機(jī)器人較少,需將人工智能技術(shù)更多應(yīng)用在池塘養(yǎng)殖,、工廠循環(huán)水養(yǎng)殖機(jī)器人的研發(fā)上,,發(fā)展高可靠性、高集成度并具有綜合補(bǔ)償和校正功能的小型機(jī)器人,。
三、水產(chǎn)養(yǎng)殖水下機(jī)器人
如今,,越來越多的養(yǎng)殖場(chǎng)開始使用水下機(jī)器人完成一些傳統(tǒng)的工作,。
水產(chǎn)養(yǎng)殖水下機(jī)器人又稱為無人水下潛水器,是指可以對(duì)水產(chǎn)養(yǎng)殖水體環(huán)境進(jìn)行遠(yuǎn)程監(jiān)測(cè),、感知養(yǎng)殖對(duì)象信息和實(shí)現(xiàn)智能作業(yè)功能的機(jī)器人,,可實(shí)現(xiàn)清理、放苗,、飼養(yǎng),、管理、收獲等智能化作業(yè),,但目前大多處于實(shí)驗(yàn)室研究階段,,未能在實(shí)際生產(chǎn)中廣泛應(yīng)用。水下機(jī)器人根據(jù)與水面支持系統(tǒng)間的聯(lián)系方式可以分為遙控水下機(jī)器人和自治水下機(jī)器人兩類,,其涉及的關(guān)鍵技術(shù)分類和應(yīng)用如圖所示,。
熱潮來臨,,水下機(jī)器人大有可為!")
遙控水下機(jī)器人是指通過臍帶纜和母船進(jìn)行通信,,由母船通過電纜向其提供動(dòng)力,、實(shí)施遙控操作。遙控水下機(jī)器人多為開架式結(jié)構(gòu),,易于布置和安裝設(shè)備,,具有作業(yè)能力強(qiáng)、適應(yīng)能力強(qiáng)和操作靈活等優(yōu)點(diǎn),。其缺點(diǎn)一是因電纜長(zhǎng)度有限導(dǎo)致活動(dòng)范圍較小,,二是因電纜碰撞失效和斷裂導(dǎo)致本體丟失的可能。
自治水下機(jī)器人自帶動(dòng)力,和母船之間沒有臍帶纜連接,,可以通過自主決策來完成運(yùn)動(dòng)路徑的規(guī)劃,,多呈流線型來減小運(yùn)動(dòng)阻力從而獲取更長(zhǎng)的工作時(shí)間,具有活動(dòng)范圍大,、智能化,、隱蔽性好等優(yōu)點(diǎn),缺點(diǎn)則是作業(yè)時(shí)間受攜帶的動(dòng)力限制,。水下機(jī)器人將人工智能,、探測(cè)識(shí)別、信息融合,、智能控制,、模式識(shí)別、系統(tǒng)集成等技術(shù)應(yīng)用于同一載體上,,完成如電纜敷設(shè)檢查,、海底礦藏調(diào)查、撈救作業(yè),、環(huán)境監(jiān)測(cè)及江河水庫大壩檢查等工作,。
四、人工智能技術(shù)如何在水下機(jī)器人領(lǐng)域中應(yīng)用
從目標(biāo)識(shí)別,、路徑規(guī)劃與導(dǎo)航,、控制與作業(yè)3方面說明人工智能技術(shù)如何在水下機(jī)器人領(lǐng)域中應(yīng)用,以及研究現(xiàn)狀和技術(shù)瓶頸,。
1 目標(biāo)識(shí)別
水產(chǎn)養(yǎng)殖水下機(jī)器人為實(shí)現(xiàn)定位和作業(yè)首先要進(jìn)行水下目標(biāo)的識(shí)別,,在準(zhǔn)確獲取目標(biāo)信息后才能做出決策控制?;谌斯ぶ悄芗夹g(shù)的目標(biāo)識(shí)別是指利用計(jì)算機(jī)視覺的方法,,對(duì)水下攝像機(jī)采集的圖像進(jìn)行智能化信息提取,之后對(duì)圖像感興趣區(qū)域利用邊界,、聚類,、閾值、區(qū)域和人工神經(jīng)網(wǎng)絡(luò)等分割方法進(jìn)行處理,,提取出感興趣區(qū)域后再用主動(dòng)輪廓法,、神經(jīng)網(wǎng)絡(luò)、多特征融合和機(jī)器學(xué)習(xí)等方法進(jìn)行目標(biāo)識(shí)別,,無需外界干預(yù),,能夠基本滿足水下近距離快速準(zhǔn)確識(shí)別目標(biāo)的要求,并且具有較強(qiáng)的適應(yīng)性,。
Cai等針對(duì)目標(biāo)識(shí)別時(shí)面臨的水質(zhì)渾濁和目標(biāo)遮擋等問題,,提出了一種基于轉(zhuǎn)移強(qiáng)化學(xué)習(xí)的多自主水下機(jī)器人協(xié)同目標(biāo)識(shí)別方法,,對(duì)干擾環(huán)境下的目標(biāo)信息進(jìn)行了強(qiáng)化訓(xùn)練,保證了算法的實(shí)時(shí)性,;在渾水,、目標(biāo)遮擋、光線不足,、背景復(fù)雜以及目標(biāo)重疊5種環(huán)境下進(jìn)行仿真實(shí)驗(yàn),,發(fā)現(xiàn)所提出的模型可以減少相似數(shù)據(jù)的重復(fù)計(jì)算,確保該方法的時(shí)效性,。
湯中強(qiáng)針對(duì)水下目標(biāo)的三維位置估計(jì)問題,,采用加速穩(wěn)健特征點(diǎn)(Speeded Up Robust Features,SURF)的光流跟蹤法對(duì)特征點(diǎn)進(jìn)行跟蹤,,該算法在成本低于傳感器測(cè)量的基礎(chǔ)上,,可對(duì)目標(biāo)物實(shí)時(shí)定位,為機(jī)器人水下作業(yè)提供了保障,。賈玉珍和王玥為了削弱復(fù)雜惡劣的環(huán)境對(duì)水下成像造成的不利影響,,并滿足水下機(jī)器人目標(biāo)識(shí)別任務(wù)實(shí)時(shí)性的需求,提出了基于人工魚群算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的水下目標(biāo)識(shí)別算法,,試驗(yàn)結(jié)果表明該方法的準(zhǔn)確率較粒子群優(yōu)化神經(jīng)網(wǎng)絡(luò)和免疫遺傳算法高出2%左右。
目前水下攝像機(jī)采集圖像的質(zhì)量受海水濁度和能見度影響很大,,總體成像距離較短,。由于水下成像環(huán)境較為復(fù)雜,在成像過程中水體對(duì)光散射和吸收效應(yīng)等影響,,導(dǎo)致一般成像設(shè)備的作用距離只有幾米到十幾米,,且圖像質(zhì)量具有對(duì)比度低、邊緣模糊,、色彩丟失,、噪聲嚴(yán)重等不足,極大影響了水下目標(biāo)的精準(zhǔn)識(shí)別與定位,。因此,,研究利用的水下圖像恢復(fù)算法和智能識(shí)別算法是提高水下目標(biāo)識(shí)別準(zhǔn)確性的關(guān)鍵。
2 路徑規(guī)劃與導(dǎo)航
水下機(jī)器人導(dǎo)航與定位是水下機(jī)器人進(jìn)行路徑規(guī)劃以及準(zhǔn)確作業(yè)的關(guān)鍵,。由于水產(chǎn)養(yǎng)殖環(huán)境復(fù)雜,,使得機(jī)器人在水下導(dǎo)航與定位比在陸地困難?;谌斯ぶ悄艿乃聶C(jī)器人路徑規(guī)劃是指水下機(jī)器人通過視覺系統(tǒng)獲取水中環(huán)境圖像,,提取圖像中的特征點(diǎn)實(shí)現(xiàn)全局和局部特征的匹配,同時(shí)使用濾波算法獲得所需的理想邊緣特征點(diǎn),,最終結(jié)合水下機(jī)器人和障礙物相關(guān)參數(shù)進(jìn)行相應(yīng)的路徑規(guī)劃,,其主要方法分為建模和路徑搜索兩種,。
其中路徑規(guī)劃方法包括群智能和機(jī)器學(xué)習(xí)。群智能方法將路徑規(guī)劃問題轉(zhuǎn)化為最優(yōu)搜索問題,,但該方法較依賴先驗(yàn)的環(huán)境知識(shí),,而具有自主學(xué)習(xí)能力的機(jī)器學(xué)習(xí)方法無需考慮環(huán)境因素,可以更好地解決水下機(jī)器人在未知環(huán)境下的局部路徑規(guī)劃問題,。
熱潮來臨,,水下機(jī)器人大有可為,!")
3 控制與作業(yè)
作業(yè)控制是水下機(jī)器人在水產(chǎn)養(yǎng)殖中實(shí)現(xiàn)自主作業(yè)的核心,對(duì)于水下機(jī)器人實(shí)現(xiàn)高精度,、高穩(wěn)定性作業(yè)具有重要意義,。由于水產(chǎn)養(yǎng)殖環(huán)境的復(fù)雜性、作業(yè)對(duì)象的多樣性和脆嫩易損性,,要求水下機(jī)器人能夠精確穩(wěn)定地控制本體,、機(jī)械臂和末端執(zhí)行器,在作業(yè)過程中實(shí)現(xiàn)自主行走,、機(jī)器臂準(zhǔn)確達(dá)到目標(biāo)點(diǎn),、末端執(zhí)行器自主動(dòng)作的有機(jī)協(xié)調(diào),最終達(dá)到高精度,、自主式作業(yè)的目的,。
人工智能技術(shù)在水下機(jī)器人應(yīng)用中的最大優(yōu)勢(shì)在于無需事先了解水下機(jī)器人動(dòng)力學(xué)知識(shí),可對(duì)全部或部分非線性動(dòng)力模型進(jìn)行學(xué)習(xí),,并計(jì)算控制策略模型,,當(dāng)控制正確率足夠高時(shí),再將仿真計(jì)算中的控制策略模型作為初始模型移植到水下機(jī)器人平臺(tái)并在真實(shí)的水產(chǎn)環(huán)境下學(xué)習(xí),。
隨著人工智能技術(shù)的廣泛應(yīng)用,,國(guó)內(nèi)外學(xué)者主要利用神經(jīng)網(wǎng)絡(luò)、自適應(yīng)控制,、模糊控制等方法對(duì)水下機(jī)器人進(jìn)行作業(yè)控制,。Xu等提出了神經(jīng)模糊控制器來實(shí)現(xiàn)水下機(jī)器人操作系統(tǒng)跟蹤控制。雖然模糊控制器是一種不依賴于模型的智能控制方法,,但是模糊控制的規(guī)則調(diào)整比較復(fù)雜,,因此在實(shí)際應(yīng)用中具有一定的難度。
韓凌云利用徑向基神經(jīng)網(wǎng)絡(luò)控制器整體補(bǔ)償控制水下機(jī)器人運(yùn)動(dòng),,并利用Lyapunov方法證明了控制系統(tǒng)的漸近穩(wěn)定性,,通過仿真驗(yàn)證了該自適應(yīng)控制系統(tǒng)的靈活性、自適應(yīng)性和可行性,。Carlucho等開發(fā)了適用于水下機(jī)器人自適應(yīng)控制系統(tǒng)的強(qiáng)化學(xué)習(xí)框架,,該框架將最原始的感知信息作為輸入,,并輸出連續(xù)的控制策略行為,可有效解決自主水下機(jī)器人控制中命令混亂問題,。
目前人工智能技術(shù)在水下機(jī)器人中的應(yīng)用研究多數(shù)都是在實(shí)驗(yàn)室條件下進(jìn)行的,,與農(nóng)田、果園中的機(jī)器人相比,,水產(chǎn)養(yǎng)殖中的機(jī)器人和智能裝備面臨的最大問題就是環(huán)境,,水下機(jī)器會(huì)受到風(fēng)、浪,、水壓,、酸堿度等復(fù)雜因素的嚴(yán)重干擾。因此,,在未來的發(fā)展中,,需重點(diǎn)關(guān)注水下信號(hào)傳輸技術(shù)和圖像處理技術(shù),這將為提高復(fù)雜環(huán)境下水下機(jī)器人作業(yè)精度提供新策略,。
除此之外,,還需將機(jī)械手的精細(xì)化作業(yè)融合機(jī)械手的控制方法和抓取策略等內(nèi)容作為研究重點(diǎn),基于逆向強(qiáng)化學(xué)習(xí)的方法,,機(jī)械手可以推測(cè)主從式機(jī)械手操作人員的意圖,,從而快速學(xué)習(xí)操作專家經(jīng)驗(yàn),這也是水下機(jī)械手智能作業(yè)的一個(gè)發(fā)展方向,。
熱潮來臨,,水下機(jī)器人大有可為!")
五,、水下機(jī)器人市場(chǎng)前景
中國(guó)具備大力發(fā)展“水經(jīng)濟(jì)”的極佳條件,,在政策引領(lǐng)、行業(yè)剛需及個(gè)人消費(fèi)升級(jí)的三重因素推動(dòng)下,,相關(guān)水下技術(shù)及設(shè)備應(yīng)用獲得了眾多資本關(guān)注,。如何減少人力成本、局限性與風(fēng)險(xiǎn),,如何提高相關(guān)水下作業(yè)生產(chǎn)力和效率,,成了相關(guān)領(lǐng)域重要的發(fā)展路線。
海洋面積占地球總面積的71%,,我國(guó)自古就有利用海洋資源的歷史,,大陸海岸線長(zhǎng)達(dá)1.8萬公里,海洋浴場(chǎng)面積超過200萬平方公里,,大陸架面積超過130萬平方公里,,是典型的海洋資源大國(guó),。
我國(guó)近年不斷加大水下機(jī)器人研發(fā)投入,已成為全球水下機(jī)器人產(chǎn)量最多的國(guó)家;銷量也位列前茅,,占據(jù)全球25%以上市場(chǎng)份額,。在發(fā)展智慧海洋的戰(zhàn)略助推下,我國(guó)對(duì)水下機(jī)器人的需求仍將擴(kuò)大,,預(yù)計(jì)至2025年還有2-3倍的增長(zhǎng)空間,,市場(chǎng)潛力正在不斷釋放,未來前景廣闊,。
文章來源:中研普華,,智慧農(nóng)業(yè)資訊,深之藍(lán)水下機(jī)器人,,大海的時(shí)間